
 |
| Lugar de origen: | Jiangsu, China (continente) |
| Nombre de la marca: | Jkongmotor |
| Certificación: | CE, Rohs, ISO,Reach... |
| Número de modelo: | la nema 23 integró el motor de pasos para el CNC |
| Cantidad de orden mínima: | 3-10PCS |
|---|---|
| Detalles de empaquetado: | muestra con el cartón de la exportación. cantidad grande con la plataforma |
| Tiempo de entrega: | Para las muestras, 7-15 días/para el lote, 15-25days |
| Capacidad de la fuente: | 100000pcs/month |
| nombre: | la nema 23 integró el motor de pasos | Tipo del motor: | motor de pasos integrado con el codificador |
|---|---|---|---|
| Nombre modelo: | motor de pasos integrado del tornillo de posicionamiento | Voltaje clasificado: | nema 17 (24V - 36V); nema 23 (24V - 50V) |
| Actual: | nema 17 (0.8A - 2A); nema 23 (4A - 5A) | Llevar a cabo el esfuerzo de torsión: | 0.48N.m / los 0.72N.m/el 1.2N.m/los 2.2N.m/los 3N.m |
| Longitud corporal: | 47m m/60m m/56m m/80m m/101m m | Eje: | eje del motor de 5m m o de 8m m |
| Características: | 23 motores servos del paso integrado de la nema Canopen/RS485 17 hicieron salir 3NM con el sistema d | ||
| Alta luz: | La salida 3NM integró los motores servos del paso,Nema 17 circuito cerrado de 2 fases de pasos,motor de pasos de la impulsión integrada del eje de 5m m |
||
La nema 17 23 integró el motor de pasos servo los 2N.m los 3N.m 4A 5A circuito cerrado de 2 fases de pasos con la comunicación CANopen/RS485
Technicalcharacteristics:
1. Ningún paso perdido, colocación exacta
2. Autobús estándar RS-485 de la ayuda y autobús de la PODER
3. Protocolo estándar de Modbus-RTU de la ayuda y protocolo de CANopen
4. Tres modos de control con modo de la posición, modo de la velocidad y modo autodirigido
5. Señal de entrada incorporada del CW, del CCW, del interruptor IO con 5V o 24V para el límite y la referencia autodirigida
6. Una señal de salida de la señal del freno de la ROTURA
7. La conexión de red estándar RJ45 del esclavo a través del cable del par trenzado puede ser conectada
8. La frecuencia de la transmisión es apoyada más por 1Mbps, y la distancia de transmisión es el hasta 1KM más lejano
9. motor impulsor del esfuerzo de torsión clasificado del 100%
10. Tecnología actual variable del control, eficacia de gran intensidad
11. Pequeños vibración y buen funcionamiento en de poca velocidad
12. Control incorporado de la aceleración y de la desaceleración para mejorar comienzo y para parar suavidad
13. Los usuarios pueden definir sus propias subdivisiones
14. 1000 - alambre y 2500 - codificadores compatibles del alambre
15. Los parámetros generales del uso no necesitan ser ajustados
16. Pierda la protección de la fase, sobre la protección actual, sobre la protección del voltaje y sobre la protección de error de posición
1. la nema híbrida 23 de 57m m integró la especificación de Genaral del motor de pasos:
| Nombre | la nema 23 integró el motor de pasos |
| Modelo | motor de pasos integrado con el codificador |
| Tipo del motor | motor de pasos integrado del tornillo de posicionamiento |
| Voltaje clasificado | nema 17 (24V - 36V); nema 23 (24V - 50V) |
| Llevar a cabo el esfuerzo de torsión | 0.48N.m / los 0.72N.m/el 1.2N.m/los 2.2N.m/los 3N.m |
| Longitud corporal | nema 17 (47m m/60m m); nema 23 (56m m/80m m/101m m) |
| Actual | nema 17 (0.8A - 2A); nema 23 (4A - 5A) |
| Eje | eje del motor de 5m m o de 8m m |
| Control de la ayuda | CANopen CiA402/RS485 MODBUS |
| Características | 23 motores servos del paso integrado de la nema Canopen/RS485 17 hicieron salir 3NM con el sistema de pasos del lazo cerrado del codificador 1000Line |
2, características del conductor integrado del regulador del motor de pasos:
1): Una nueva generación de tecnología de 32 bits de DSP.
2): Protocolo estándar de la ayuda MODBUS-RTU.
3): terminal de la función de entrada de 4 maneras, terminal bidireccional de la función de salida.
4): Se reduce el decaimiento del esfuerzo de torsión, y la velocidad puede alcanzar 3000rpm.
5): Salida incorporada de la alarma para la supervisión y el control fáciles.
6): Ajuste inteligente actual, reduzca la vibración, ruido y calor, y eficacia del aumento por el 35%.
7): Gama del voltaje: DC24~50V.
8): 16 subdivisiones ajustables, el defecto son 1000pulse/r.
9): Velocidad y rigidez excelente, integración perfecta de servo y de pasos.
10): Con la sobretensión, el undervoltage, la sobreintensidad de corriente y otras funciones de la protección.
11): Diseño integrado con el motor impulsor. Instalación fácil, pequeña huella y cableado simple.
3, uso del motor de pasos de la impulsión integrada:
La impresión, AOI, la vinculación del panel, el equipo de la transferencia, el etc. en el PWB relacionaron el equipo; equipo relacionado de la cámara tal como cámara y huella dactilar; máquina cristalina sólida, máquina de vinculación del alambre, máquina de dispensación, divisor de haz, y máquina de cinta del paquete en el empaquetado.
4, especificación general de nema 23 integraron el motor de pasos:
| Especificación | Serie de ISM57-R | |||
| Unidad | Mínimo | Típico | Máximo | |
| Corriente de salida | 1,8 | - | 4 | |
| Voltaje entrado | VDC | 24 | 36 | 50 |
| Corriente de entrada clasificada | mA | 10 | 10 | 50 |
| Voltaje de entrada clasificado | V | - | 24 | 24 |
| Frecuencia del pulso | kilociclo | 0 | - | 200 |
| Resistencia de aislamiento | MΩ | 100 | - | - |
5, datos de Techical:
| Datos de Techical | ||||
| Nombre | Unidad | ISM57-R1x | ISM57-R2x | ISM57-R3x |
| Fase | fase | 2 | 2 | 2 |
| Ángulo del paso | ° | 1,8 | 1,8 | 1,8 |
| Voltaje clasificado | V (DC) | 24~50 | 24~50 | 24~50 |
| Corriente de salida | 4 | 5 | 5 | |
| Llevar a cabo el esfuerzo de torsión | N.m | 1,2 | 2,2 | 3 |
| Longitud del motor | milímetro | 56 | 80 | 101 |
| Grado del aislamiento | - | B | B | B |
| Temperatura de funcionamiento | ℃ | 0~55 | 0~55 | 0~55 |
6, descripción terminal:
| Descripción terminal | |||
| Pin | Función | Nota | Diagrama esquemático del interfaz |
| PWR | Indicador de poder | Del poder indicador encendido | 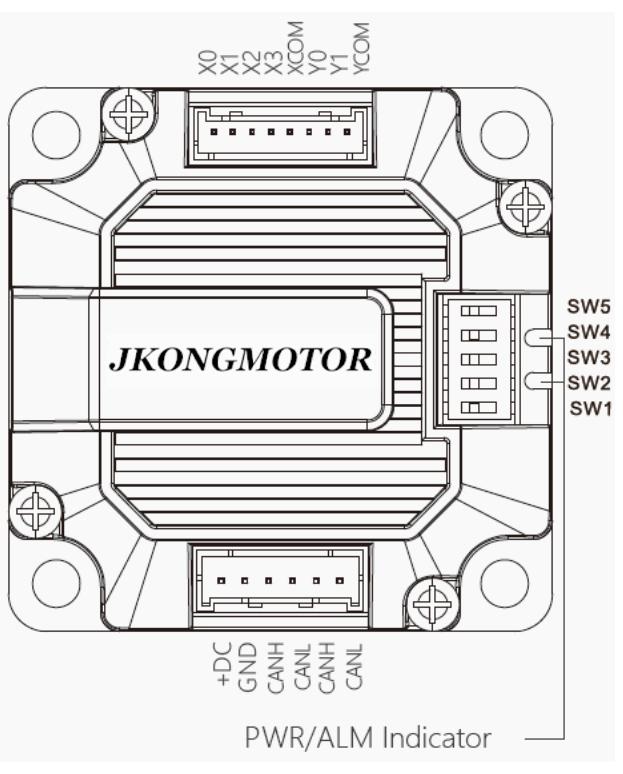 |
| ALM | Indicador de la alarma | Alarma que pesca el indicador | |
| X0-X3 | terminal de 4 entradas | Terminal de la entrada-salida, fuente de alimentación de la señal 24V, ayuda NPN y modos del cableado de PNP dos, modificación terminal del software de la función de la ayuda | |
| XCOM | Campo común entrado | ||
| Y0-Y1 | terminal de salida 2 | ||
| YCOM | Salida común | ||
| B | Interfaz de comunicaciones RS485 1 | 2 sistemas del interfaz de comunicaciones RS485, usados para adentro y hacia fuera conexión, velocidad del defecto son 115200, formato de datos son: datos de 8 bits, ningún dígito de control, 1 pedazo de parada. | |
| A+ | |||
| B | Interfaz de comunicaciones RS485 2 | ||
| A+ | |||
| +DC | Terminal positivo de la potencia de entrada | DC24~50V | |
| Tierra | Terminal negativo de la potencia de entrada | ||
7, terminal de la entrada-salida:
| Terminal de la entrada-salida: | ||
| Pin | Nombre | Función |
| X0 | Terminal entrado | Terminal de la entrada-salida, fuente de alimentación de la señal 24V, ayuda NPN y modos del cableado de PNP dos, modificación terminal del software de la función de la ayuda |
| X1 | ||
| X2 | ||
| X3 | ||
| XCOM | Terminal común de la entrada | |
| Y0 | Terminal de salida | El terminal de salida, la corriente de conducción máxima es 50mA, modificatio terminal del software de la función de la ayuda |
| Y1 | ||
| YCOM | Terminal de salida común | |
8, ajuste de los interruptores dip:
| Ajuste de los interruptores dip: | ||
| Pin | Muestra | Función |
| 1 | SW1 | SW1: Resistencia terminal |
| 2 | SW2 | SW2-5: Ajuste de la dirección |
| 3 | SW3 | |
| 4 | SW4 | |
| 5 | SW5 | |
9, ajuste del puerto del poder:
| Ajuste del puerto del poder: | ||
| Pin | Nombre | Función |
| B | Puerto de comunicación | Puerto de comunicación de MODBUS |
| A+ | ||
| B | ||
| A+ | ||
| Tierra | Puerto del poder | DC: 24V~ 50V |
| +DC | ||
10, lanzamiento de la alarma:
| Lanzamiento de la alarma: | |||
| Código de error | Información de error | Piloto de ALM | Reajuste |
| Err1: (0x01) | Sobreintensidad de corriente o cortocircuito entre fases | Reset del poder-abajo | |
| Err2: (0x02) | El voltaje de fuente de alimentación es demasiado alto | Cerradura/reset auto | |
| Err3: (0x03) | El voltaje de fuente de alimentación es demasiado bajo | Cerradura/reset auto | |
| Err5: (0x05) | Fuera de torlance | Reset del poder-abajo | |
11, ambiente del uso:
| Ambiente del uso: | ||
| Cámara de enfriamiento | Enfriamiento del disipador de calor | |
| Ambiente del uso: | Ambiente del uso | Guarde lejos del otro equipo de calefacción lo más lejos posible, evite el polvo, niebla del aceite, gas corrosivo, lugares fuertes de la vibración, prohíba el gas inflamable y el polvo conductor |
| Temperatura | 0℃ ~ 50℃ | |
| Humedad | 40 ~ derecho del 90% (ninguna condensación) | |
| Choque | 10 ~ 55Hz/0.15m m | |
| Temperatura de almacenamiento | -20℃ ~ +80℃ | |
12, producto dimensiona: (Unit=mm)
13, diseño modificado para requisitos particulares:
Si este motor no hace juego con su petición. Por favor no dude en entrar en contacto con con nosotros, podemos hacer el eje modificado para requisitos particulares/la bobina/el reborde de montaje/el cable/el conector/el codificador/el freno/la caja de cambios y otras. Queremos trabajos de lado a lado con usted y su equipo para diseñar un motor que quepa las necesidades exactas de su uso. Toda la ingeniería y ayuda es internas hecho.
14, tipos modificados para requisitos particulares del eje:
Persona de Contacto: Miss. Annie
Teléfono: +8615995098661
Fax: 86-519-88713769
Dirección: Edificio A2, zona industrial de Hutang, Lingdao Rd, distrito de Wujin, Changzhou, China.Zip: 213162
Dirección fábrica:Edificio A2, zona industrial de Hutang, Lingdao Rd, distrito de Wujin, Changzhou, China.Zip: 213162












